フライトシム用ラダーペダルの自作 その3
続きです。
前回でペダル部とリニアシャフトの接続は目処がつきましたので、次の段階に進めていきます。改造のベースとなるThrustmaster TFRPはペダルの間隔が狭めです。これはコンパクトでスペース的には良い点でもあるのですが、脚の体勢がちょっと不自然な感じになりますね。そこで、もっと自然に足を置けるくらいにペダル間隔を拡幅したいと思います。なので、既存のパーツに取り付けるこのようなものをモデリングしました。これも全くの勘のみに頼った思いつきですので実際に出来てから取り付けてみないとうまく動作するかは自信がありません。

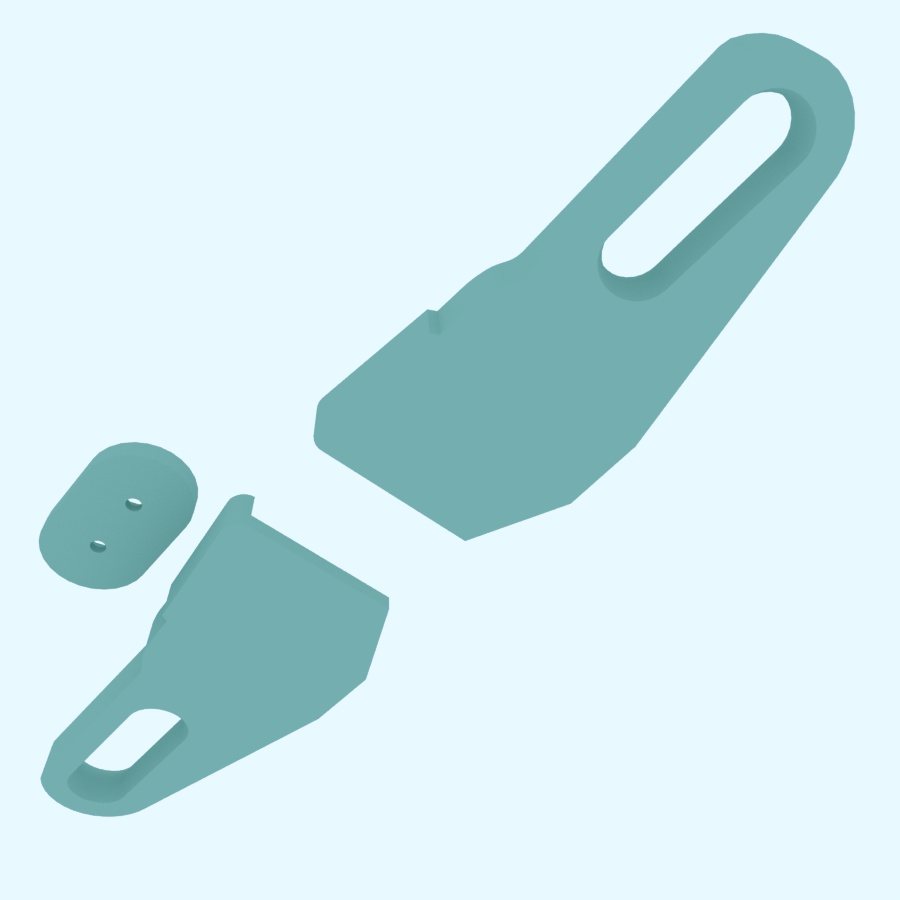
これは脚の荷重がのった状態でペダルを前後させるくらいの強度と、組み込む際にガタつきがないよう造形精度が必要だと思うので光造形プリンターMIRACLPと高靭性レジンxULTRATを使い作成しました。


うまく既存パーツの形状に合致するか心配しましたがどうやらうまくいきそうです^ ^ これで片側約40mmづつ拡幅ができ脚が自然に置けるようになるはずです。ただ、スムーズに動作するかの確認は実際に組み立ててみるまでお預けです。
さて次の作業はペダル構造を支えるための新しい躯体を作らなければなりません。それをどうやって実現するか色々考えたのですが、結局既存のケースを正確に計測してコピーする作戦に落ち着きました。ノギスなどを使ってビス穴の位置や間隔をなるべく誤差なく測りそれを3Dに起こしていきます。


今回ケースは上下2段構造にしました。それは一発でうまくいく自信があまり無いからです。これを一体構造で出力するとなると15時間くらいかかると思いますが、万が一設計ミスで再出力となったとき時間を大きく浪費することになります。なのでなるべくロスを少なくするため、重要な構造が集中する上側と嵩上げが主になる下側とに分けて出力することによって保険としました。正確な計測で一発でピッタリと決まれば一番いいです^ ^
それではZortraxにて出力です。
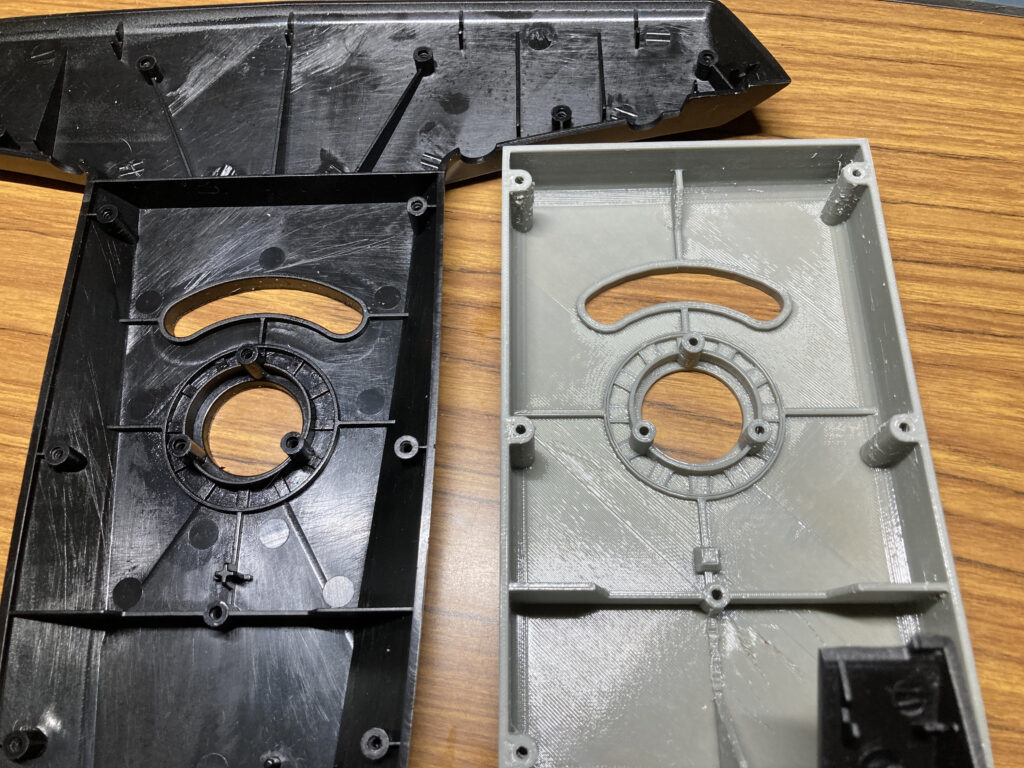
これは一番積層が厚い設定で出力しました。うちのZortrax M200は古い初期型で、この設定にすると非常に造形が乱れます。今回も一部積層がきちんと密着せずバラバラになっていた部分もありましたが、アセトンで溶かしたフィラメントとUVレジンで修正しました。また、一部設計にミスがありましたので超音波カッターで切り欠いたりしています。また、積層から割れてしまわないように気化アセトンに浸けて積層の溶着も行いました。
それではポテンショメータやスプリング機構がきちんと収まるか組み立ててみます。
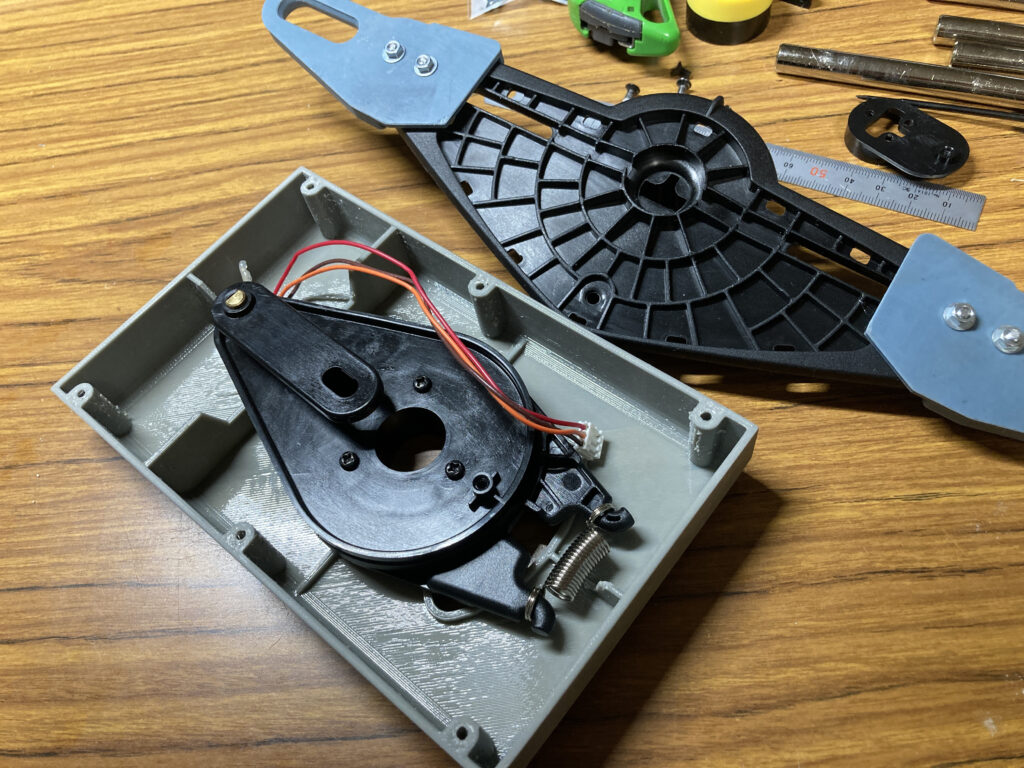
うまくピッタリ組み上がりました。ただし全体として組み上げた時にスムーズに動くかはまだ判りません。早く下側ケースを出力し全体組み立てをしたいと思います。
改造ペダルの台座として近所のホームセンターで安売りしていた板を買ってきました。サイズもちょうどいいはずです。

シャフトが左右で平行になるようにちゃんと位置を計測して慎重にビス留めし、板の中心線にケースをしっかり固定し、いよいよ全体としての動作確認ですよ^ ^ 自分の理想とする超絶スルスル動作のラダーペダルになっていると良いのですが・・・さてどうでしょうか




お〜っ!これはすごい!まさにスムーズ!!一切抵抗無く左右に動かすことができます。両足の間隔も広すぎず狭すぎずちょうど良いと思います。
これは実にいいものができました^ ^ 本当に細かい入力が脚でも行えるようになりMSFS2020でのヘリコプターの操縦が格段にしやすくなりました。
実際に使用して気づいたことは、あまりにスムーズに動くので標準のスプリング機構ではニュートラルポジションが判りにくいです。特にヘリ巡航中は今両足がセンターにあると思っていても微妙にずれていることがあります。あとはスプリングの反発を減衰するダンパーがあればもっと良くなると思いました。これらは今後時間がありましたらまた取り組みたい課題です。しかし、見た目はイマイチですがペダルの取り外しもすぐにでき、リニアシャフトのメンテナンスもしやすい構造ににましたので自分としてはとても満足です。
このような拙い製作記にここまでお付き合いくださいまして本当にありがとうございます。ものづくりが大好きなのでこれからも機会がありましたらここに記していきたいと思います。
投稿者プロフィール
最新の投稿
 ものづくり2021-09-30フライトシム用ラダーペダルの自作 その3
ものづくり2021-09-30フライトシム用ラダーペダルの自作 その3 ものづくり2021-09-28フライトシム用ラダーペダルの自作 その2
ものづくり2021-09-28フライトシム用ラダーペダルの自作 その2 ものづくり2021-09-26フライトシム用ラダーペダルの自作 その1
ものづくり2021-09-26フライトシム用ラダーペダルの自作 その1 CG関連2021-09-23Corona Renderer 7 について
CG関連2021-09-23Corona Renderer 7 について
